欢迎光临~深圳市伟钰科技有限公司
语言选择:
 ∷
∷

∷
 ∷
∷

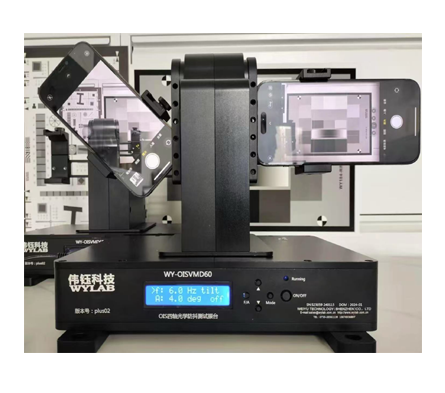
手机、无人机、科研和工业. 用于运动仿真(CIPA认证)、工具检查、生命科学、微型制造。
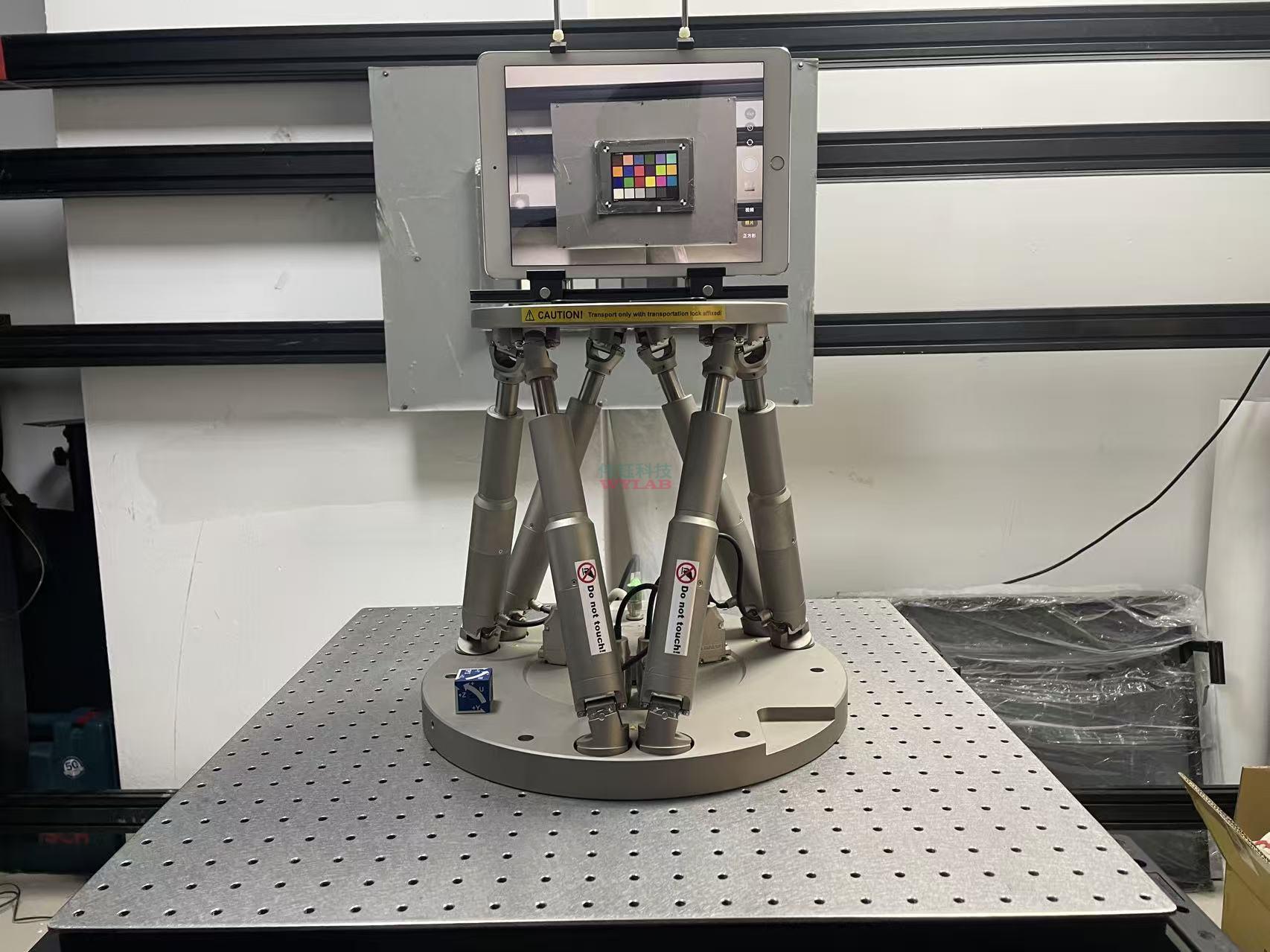

六自由度并联运动设计使其比串联运动系统更加紧凑、更具刚性,动态范围更大,无移动电缆:更稳定、摩擦更小
规格
|
运动和定位
|
H-840.G2
|
H-840.D2
|
单位
|
公差
|
|
|
直流齿轮电机
|
直流电机
|
|
|
|
主动轴
|
X,Y,Z,θX,θY,θZ
|
X,Y,Z,θX,θY,θZ
|
|
|
|
X、Y向上的行程*
|
±50
|
±50
|
毫米
|
|
|
Z向上的行程*
|
±25
|
±25
|
毫米
|
|
|
θX、θY向上的行程*
|
±15
|
±15
|
°
|
|
|
θZ向上的行程*
|
±30
|
±30
|
°
|
|
|
促动器设计分辨率
|
0.017
|
0.5
|
微米
|
|
|
X、Y向上的最小位移
|
0.3
|
5
|
微米
|
典型值
|
|
Z向上的最小位移
|
0.2
|
3
|
微米
|
典型值
|
|
θX、θY、θZ向上的最小位移
|
3; 3; 5
|
45; 45; 85
|
微弧度
|
典型值
|
|
X、Y向上的空回
|
1
|
1
|
微米
|
典型值
|
|
Z向上的空回
|
0.3
|
0.4
|
微米
|
典型值
|
|
θX、θY向上的空回
|
5
|
6
|
微弧度
|
典型值
|
|
θZ向上的空回
|
10
|
10
|
微弧度
|
典型值
|
|
X、Y向上的重复精度
|
±0.3
|
±1
|
微米
|
典型值
|
|
Z向上的重复精度
|
±0.15
|
±0.1
|
微米
|
典型值
|
|
θX、θY向上的重复精度
|
±2.5
|
±1.5
|
微弧度
|
典型值
|
|
θZ向上的重复精度
|
±3
|
±10
|
微弧度
|
典型值
|
|
X、Y和Z向上的最大速度
|
2.5
|
50
|
毫米/秒
|
|
|
θX、θY和θZ向上的最大速度
|
30
|
600
|
毫弧度/秒
|
|
|
Typ. X、Y和Z向上的典型速度
|
2
|
30
|
毫米/秒
|
|
|
Typ. θX、θY、θZ向上的典型速度
|
25
|
360
|
毫弧度/秒
|
|
|
机械特性
|
H-840.G2
|
H-840.D2
|
单位
|
公差
|
|
负载能力(底板为水平方向/任意方向)
|
10月30日
|
10月3日
|
千克
|
最大
|
|
保持力,断电(底板为水平方向/任意方向)
|
100 / 25
|
5月15日
|
牛
|
最大
|
|
其他
|
H-840.G2
|
H-840.D2
|
单位
|
公差
|
|
工作温度范围
|
-10 到 50
|
-10 到 50
|
°C
|
|
|
材料
|
铝/钢
|
铝/钢
|
|
|
|
质量
|
12
|
12
|
千克
|
±10 %
|
|
电缆长度
|
3
|
3
|
米
|
±10 毫米
|
联系人:陈先生(Mr. Aaron Chen )
手机:13076936897(微信同号)
电话:0755-2656 1139
地址: 深圳市宝安区甲岸西路尔体产业园A栋5楼5011